
Robotics Resident Catie Cuan & Interaction Technology
Over the summer Thoughtworks Arts collaborated with dancer and roboticist Catie Cuan, exploring new modes of human-robot interaction.

Thoughtworks developers created a 3D visualization toolkit, enabling Catie to rehearse her own bodily movements alongside those of industrial-scale robots.
The software, named CONCAT, was created by Thoughtworks software developers Andrew McWilliams, Andrea Allen and Felix Changoo.
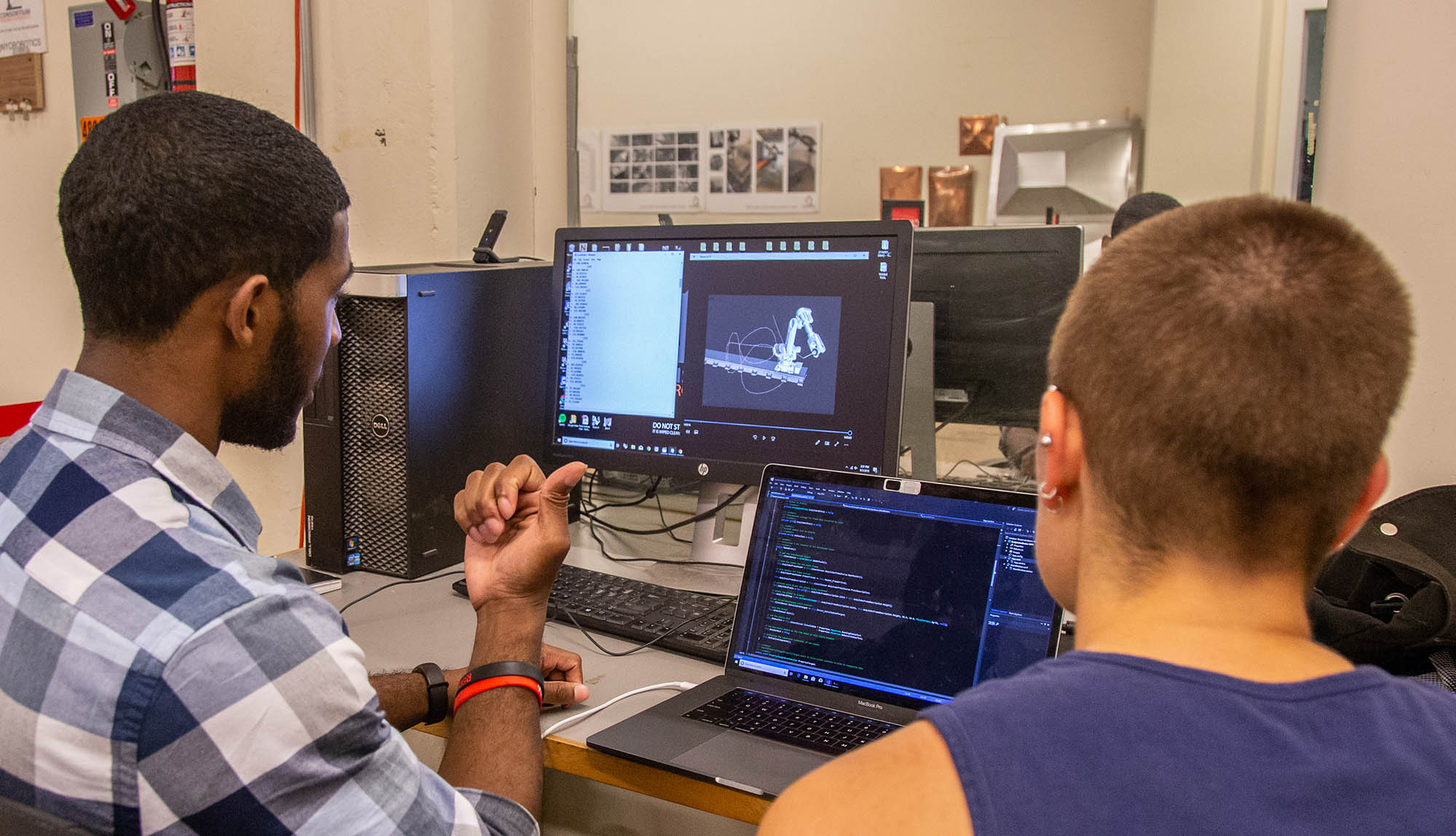
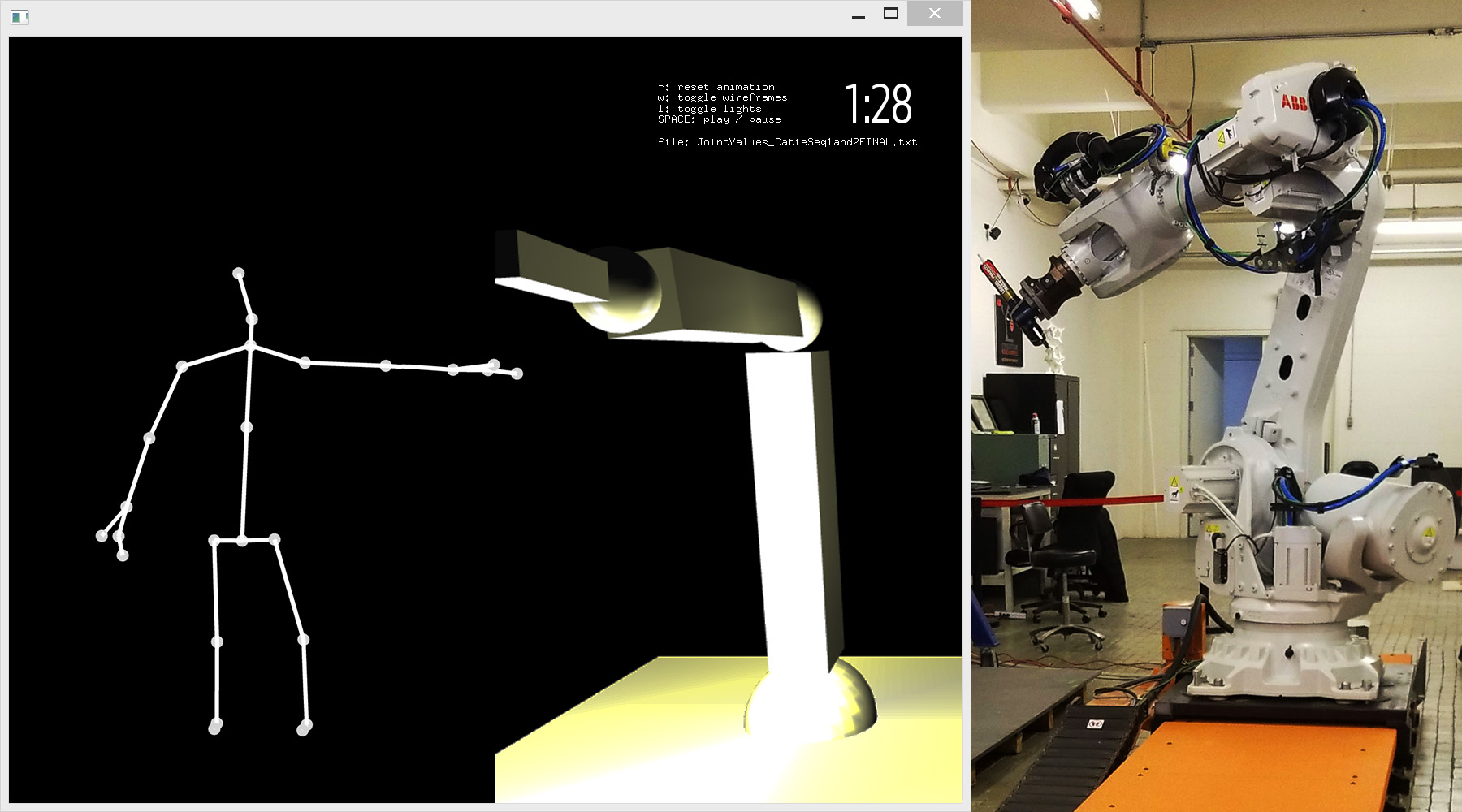
The tool renders carefully choreographed sequences designed for a 15 foot “ABB IRB 6700” robot at the Consortium for Research and Robotics in the Brooklyn Navy Yard. It allows Catie to design and rehearse her movements both on and off-site with large industrial robots.
Catie’s residency demonstrated CONCAT’s usefulness for creative movement research, and upon completion of her residency at Thoughtworks, Catie began her PhD in Mechanical Engineering at Stanford University.
Catie’s work recieved considerable media interest due to the increasing importance of the public perception of robots, especially as related technologies proliferate in the workplace. Catie’s work deals with these themes, investigating the communication flows between human and robotic agents.
In addition to rendering robotic movements, CONCAT uses a Kinect depth sensor to monitor Catie’s movements in real-time, generating a 3D representation on screen alongside the virtual robot arm.
The software behind the project was written in openFrameworks, a C++ creative coding platform useful for creating fast prototypes incorporating hardware interfaces and computer graphics.
The tool relies on the ofxKinectV2-OSC plugin, also written by Andrew McWilliams as a community contribution. All of the software used in creating CONCAT is free and open source.
Keep on top of Thoughtworks Arts updates and articles: