
Industrial Robotics and Human Movement: New Experiments
Interactions between humans and robots are becoming increasingly ubiquitous. Questions naturally emerge about the how human-robot communications can be understood, now and in the future.
Where does communication flow, and where are there ‘gaps’? Further, what is not said in human-robot interactions? Movement and gesture are vital aspects of HRI, often making up shades of unspoken meaning.
Looking at these issues are our two very different current resident artists. Catie Cuan, a classically trained ballet dancer for the Metropolitan Opera Ballet, and Adrianne Wortzel, a visual artist and former professor of entertainment technology at City Tech CUNY.

Both artists have been shooting video at the Consortium for Research and Robotics, hosted by the Pratt Institute, as part of their dual residencies with Thoughtworks Arts. They have each chosen different projects relating to the ABB IRB 6700 industrial robot arm.
The short promo video shows progress Catie has made toward developing her new piece, named OUTPUT. In the piece, Catie is exploring the potential movements of the ABB, also known as the “Wen” robot, in relation to her own movement.

Catie has been working with Thoughtworks developers Andy Allen, Felix Changoo and Andrew McWilliams to develop a new tool for analyzing robotic movement in relation to humans. The system, named concat, visualizes human movement via Kinect alongside robotic movement data generated by the ABB machine.
The visualizations generated by concat are helping Catie to develop original choreographies in relation to robotic movement.
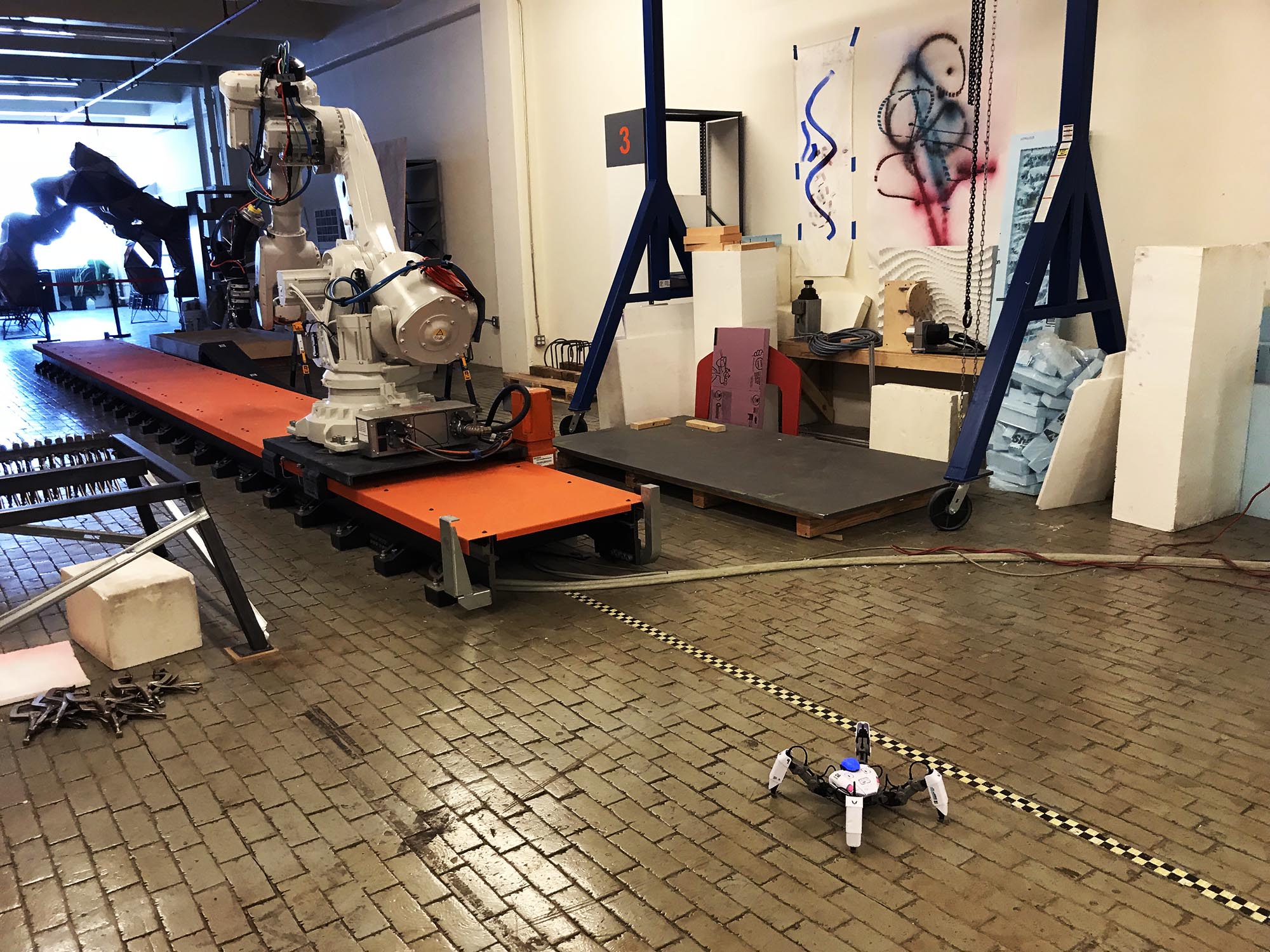
Meanwhile, Adrianne Wortzel has been continuing her exploration of the expressive potential of the Reach Robotics MekaMon, a spider robot with four legs. In the planned film, the MekaMon plays a character alongside the Wen and performer Kira Davies, pictured below.
The two residents are in the final stages of shooting these concurrent projects, in preparation for further development of their work and ideas in the weeks ahead.
Keep on top of Thoughtworks Arts updates and articles: