
Developing a Cyborg Time Sense: Research and Experimentation

Wednesday, 29 June 2016
Moving on from our successful visioning session, the team has started to coalesce around tasks. At this early stage that means research and experimentation, along with the creation of simple test rigs to measure results.
In this post, we’ll look at the progress of the engineering team for Neil Harbisson’s new “time sense”.
A new sense of time
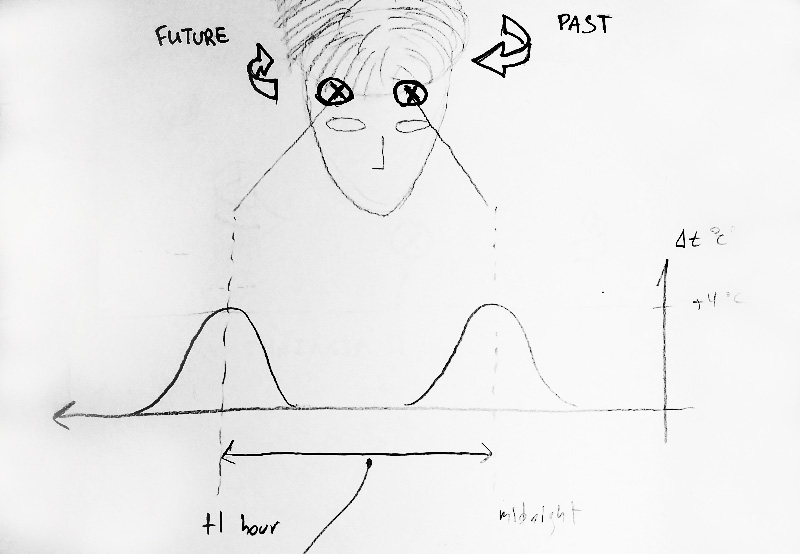
Let’s begin with a quick review of what Neil hopes to achieve. Neil wants to create a new sense of time, which will allow him to perceive the 24-hr clock as an internal sense. To do this, Neil wants to feel time as heat sensations around the circumference of his head.
Neil will eventually consider achieving this via a permanent implants. However, this residency project has a different focus. The team is helping Neil create an ‘exo-sense’ — an external sensory organ, or wearable sense.
As was the case with Neil’s existing antenna implant, the intention of this first wearable prototype is to discover how the sense feels when experienced consistently for a period of time.
An external sensory organ
Neil outlines a specific requirement for a wearable device to be considered an exosense. An exosense is an external sensory organ. It is designed to be worn consistently, twenty-four hours a day, seven days a week. It is effectively permanent — until you upgrade.
This permanence makes a key difference. A sense, as traditionally understood, is about much more than having a new incoming data stream. Instead of notifications or numerical readouts, what the wearer feels is a real-time, always-on sensory experience.
This constant exposure allows the wearer to develop new mental pathways, as the sense is learned. Over time, these pathways lead to an increasingly instinctive interaction with the sensory organ.
Eventually, the organ and it’s pathways begin to merge with existing senses, to become an indistinguishable part of the wearer’s experientiality. The aim of an exosense is to create the conditions in which this merger can occur.
When an exosense is replaced with a permanent implant, and this merger subsequently occurs, the ‘wearer’ becomes a cybernetic organism — a cyborg.
Developing the prototype exosense
Once manufactured, Neil will wear the exosense for a prolonged period of time, allowing the team to learn and adjust. Hopefully these learnings will be helpful to Neil if he decides to move forward in developing a permanent implant, at some time in the future.
However, before creating a finalized wearable exosense, the team is experimenting with prototypes. They are also designing test rigs, enabling them to build and refine these early prototypes.
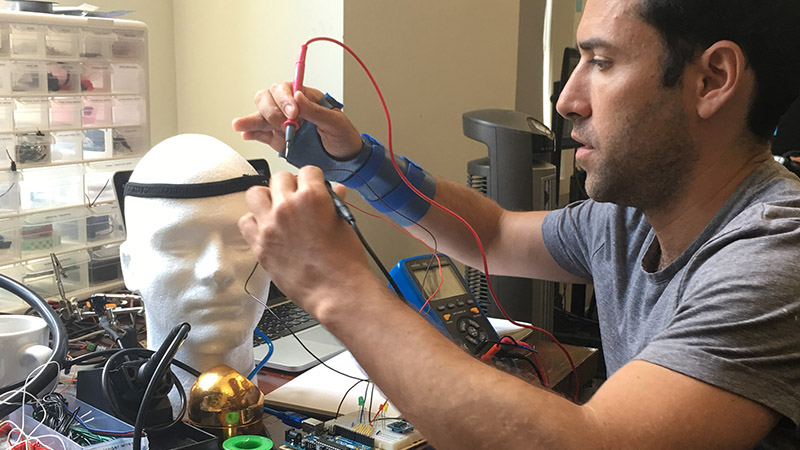
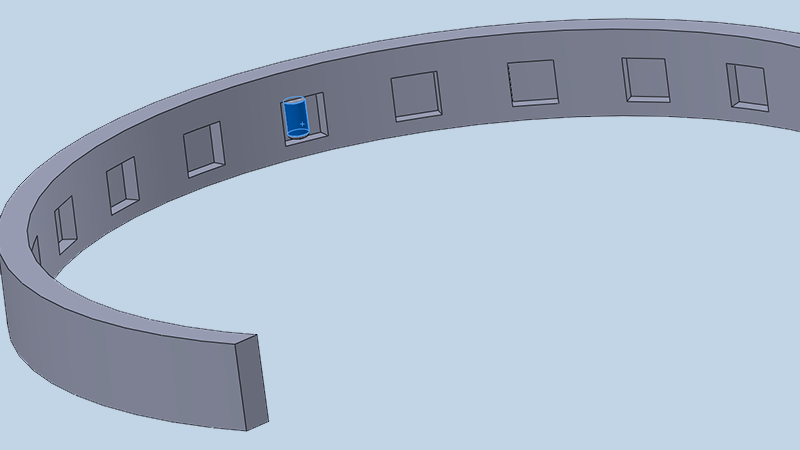
In our first prototype, resistors are positioned on a headband worn around the skull. Short bursts of pulse-width modulated current is applied to create a brief ‘moment of heat’ in each resistor, with a gentle incline and decline.
Placed at the right proximity to each other, each resistor’s moment of heat should overlap, creating a seamless experience. This allows the headband to facilitate the sensation of time-as-heat smoothly around the head.
Testing this prototype involves two streams:
- Testing individual resistors for their thermal response to applied currents, and
- Testing the behavior of resistors collectively, in position around the head
These streams allow the team to consider the efficacy of different resistors and resistive materials, and to observe the behavior of those resistors in position.
Let’s take a look at the progress made on each stream in turn.
Stream 1: Individual behavior
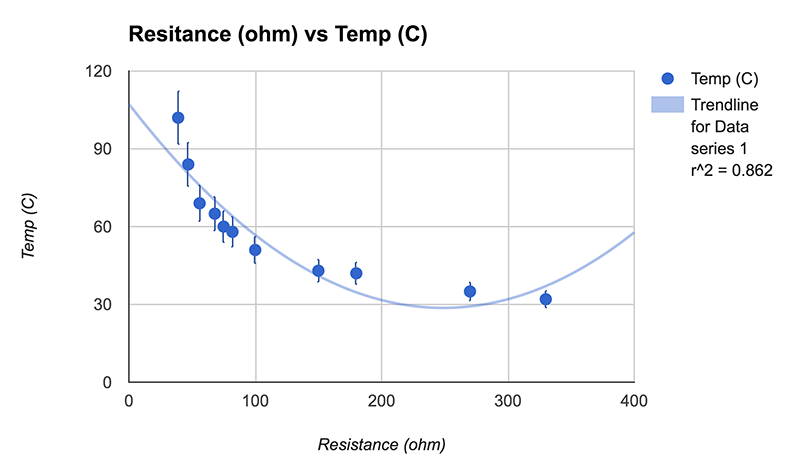
In the first test stream, the team needs to know how various individual resistors respond to different applications of current. Initially, the team ran tests applying current directly to a variety of resistors, with the results illustrated below.
To further this research, Kelvin Rojas has been experimenting with different resistive materials, such as nichrome wire, which acts as a resistor and could be a good candidate material. Nichrome is typically used in devices where electric heating is required, for example 3D printers and electronic cigarettes.
Kelvin has written Arduino code which allows him to apply a variable pulse-width modulated current to the nichrome wire based on the turning of a potentiometer. A Python script is then used to parse and plot the resulting temperatures, read by thermisters, over time.
You can see the full codebase at kr0/Arduino-PyPlot.
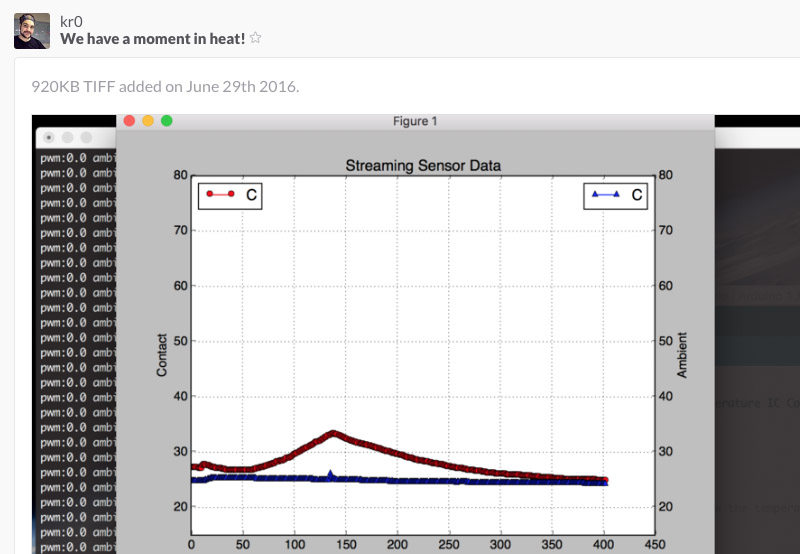
The illustration above shows the results of applying a short electrical pulse to the nichrome coil. The ambient temperature response is shown in red, the contact temperature response in blue.
The idea is to study how different pulse-width modulated currents can create different moments of heat, producing the perception of heat for some given length of time.
Stream 2: Collective behavior
To test the behavior of the resistors collectively, a test rig is required which allows us to operate in two contexts. Our initial tests will take place on styrofoam mannequin heads, allowing us to tune our intended heat signatures based on intended sensations.
Moving forward, we will test directly on Neil’s head. Given that each resistor will be located in physiologically distinct areas of the head, they may respond differently to the same application of current. Therefore, we expect to need to fine-tune each resistor again once in place.
In this second context, the test rig must allow us to compare the sensations Neil reports with a live feed of heat data from the collection of resistors.
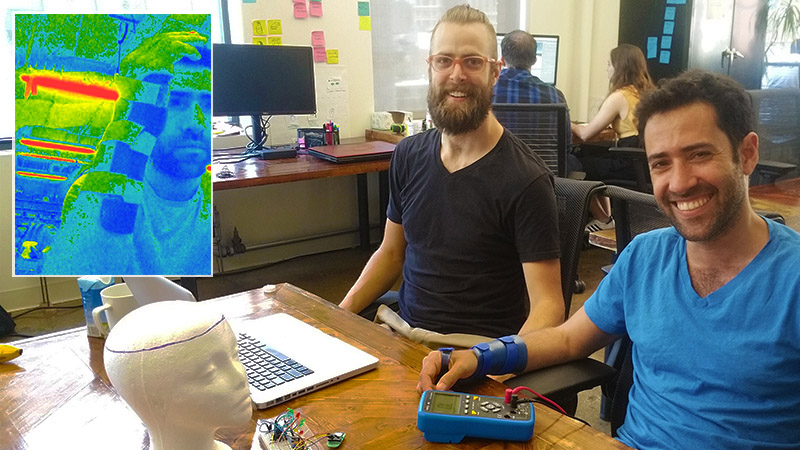
To do this, Samual Sadtler and Oryan Inbar have been experimenting with a thermal camera. Thermal cameras read infra-red radiation, which gives us an indication of heat output throughout an image area. Inset to the picture above is an initial test shot with the camera.
Using the online service Infragram, the team is able to position a mouse cursor over an RGB image, and take a reading of the same pixel from the thermal camera. In this way, they can test changes in temperature while applying various currents to resistors around the circumference of the dummy head, and ultimately Neil’s head.
With these test rigs in place, and these experiments underway, the team is ready to start designing prototypes based on acquired knowledge. Stay tuned for more updates, and follow along or drop us a line on github or twitter.
Keep on top of Thoughtworks Arts updates and articles: